

Las profundidades de las fosas marinas son hasta la fecha el mayor territorio desconocido por el ser humano. La elevada presión hidrostática que ejerce el agua impide a los buques y submarinos convencionales funcionar correctamente a presiones comprendidas entre 3.000 y 10.000 metros de profundidad, ya que necesitan estar recubiertos por pesadas carcasas metálicas que dificultan el funcionamiento de sus sistemas electrónicos integrados.
Desde hace años se ha estudiado cómo determinados seres vivos de cuerpo blando, como pulpos y medusas, son capaces de soportar estas condiciones de vida extremas. Ahora, inspirados en la estructura del pez caracol de la fosa de las Marianas (Pseudoliparis swirei), un equipo de científicos ha desarrollado un robot blando de silicona capaz de nadar a 10 kilómetros de profundidad de forma autónoma.

El diseño del robot le permitió nadar en el Mar del Sur de China a una profundidad de 3.224 metros y en la Fosa de las Marianas a una profundidad de 10.900 metros
Guorui Li et al

“El diseño del robot le permitió nadar libremente en el Mar del Sur de China a una profundidad de 3.224 metros y en la fosa de las Marianas a una profundidad de 10.900 metros. Nuestro trabajo pone de relieve el potencial del diseño de dispositivos blandos y ligeros para su uso en condiciones extremas”, afirman sus autores en el estudio, publicado en la revista Nature.
Imitación del pez caracol
Descubierto a 8.000 metros de profundidad, el pez caracol de las Marianas posee una “sorprendente” adaptabilidad y movilidad, según los autores, pertenecientes a varias universidades de China. Su cráneo parcialmente abierto y sus aletas pectorales han guiado el diseño mecánico del robot, con quien comparte similitudes visuales.
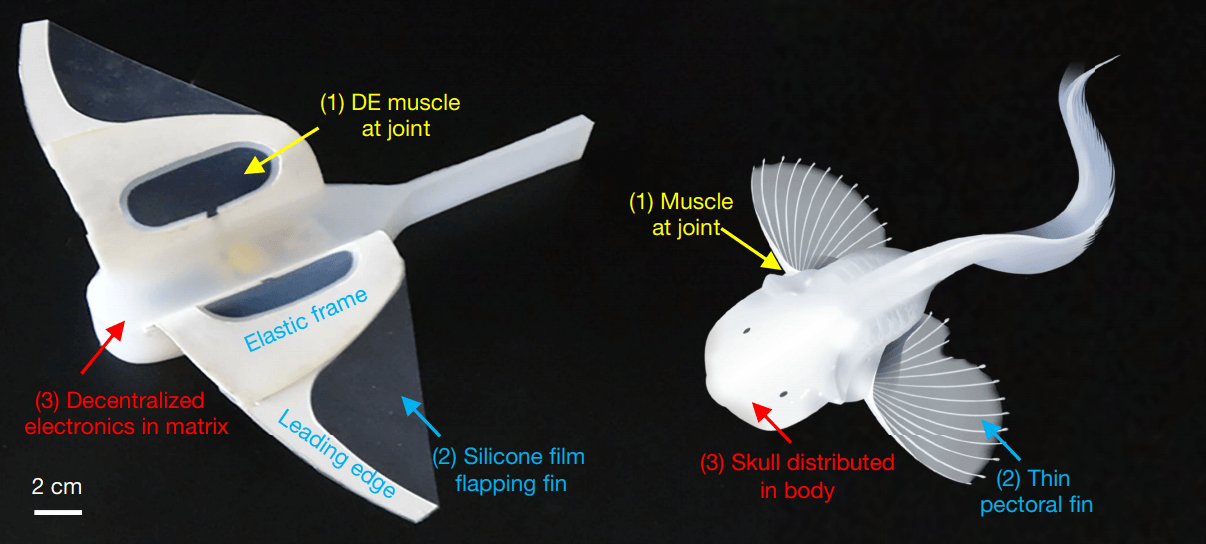
Comparación entre el robot y el pez caracol de las Marianas./ Li et al
El robot blando y flexible está diseñado para tener forma de pez y dos aletas laterales. Estas están unidas a dos “músculos” de electrodos del robot, a su vez conectados a una batería. Cuando reciben energía eléctrica, los músculos se contraen, dando lugar a un aleteo que genera el movimiento de la máquina.
Según explican sus creadores, para este tipo de máquinas submarinas se suelen centralizar en la misma zona los componentes electrónicos para recubrirlos y protegerlos de la presión de forma más eficiente. Con este robot, los investigadores decidieron descentralizarlos y distribuirlos a lo largo del cuerpo del robot, incrustados en silicona blanda. De esta forma, se reduce la tensión entre los componentes bajo presión, además de abaratar los costes.
Una vez concluido el diseño, los investigadores verificaron la capacidad de nado del robot en una cámara de agua presurizada en laboratorio. Conectada a una pértiga, la máquina se probó a una profundidad de 70 metros, donde nadó en círculos a una velocidad de 3,16 centímetros por segundo.
Los buenos resultados impulsaron a los científicos a examinar el robot en el entorno natural del Mar de China Meridional a una profundidad de unos 3.200 metros, donde logró nadar con éxito a 5,19 cm/s.
Como prueba final, hundieron el robot en la fosa de las Marianas, a 10.900 metros de profundidad. En esta ocasión, el artefacto no fue liberado del módulo de aterrizaje, sino que permaneció unido en todo momento al submarino convencional de apoyo, que tomó imágenes de la prueba. El robot aleteó con éxito durante los 45 minutos que duró la prueba.
“Este robot blando puede nadar libremente bajo una presión hidrostática de hasta 110 megapascales (MPa)”, certificaron en el estudio. A pesar de este hallazgo, los investigadores recalcan que todavía queda mucho camino por recorrer en este campo.
Los trabajos futuros se centrarán en el desarrollo de nuevos materiales y estructuras para mejorar la inteligencia, la versatilidad, la maniobrabilidad y la eficacia de los robots y dispositivos blandos
Guorui Li et al
La máquina que han desarrollado es mucho más lenta que los submarinos convencionales. No está preparada para resistir perturbaciones importantes y podría ser arrastrada por corrientes submarinas. Además, su capacidad locomotora tendrá que ser optimizada para aplicaciones prácticas, añaden.
Pero según los autores, la exploración de las profundidades marinas puede servir para llevar a cabo labores de vigilancia de los océanos, de limpieza y prevención de la contaminación marina o para conservar su biodiversidad.
“Los trabajos futuros se centrarán en el desarrollo de nuevos materiales y estructuras para mejorar la inteligencia, la versatilidad, la maniobrabilidad y la eficacia de los robots y dispositivos blandos”, concluyen.
Referencia:Li, Guorui et al. “Self-powered soft robot in the Mariana Trench”. Nature (2021)
Fuente: SINC